


























ANSYS的博客
2020年9月25日
模拟汽车雷达在5个维度
汽车雷达已成为汽车行业先进驾驶辅助系统(ADAS)革命的支柱技术之一。由于雷达使用电磁波来感知环境,所以它可以在能见度低或恶劣天气条件下远距离工作。设计能够准确捕捉各种交通状况的汽车雷达对于确保自动驾驶的安全至关重要。
在过去,汽车雷达被用于车辆的基本操作,如自动紧急制动(AEB)和自适应巡航控制(ACC),其中雷达传感器只需要向车辆提供与前方目标的距离和速度相关的信息。
然而,最近的趋势加速了部署全自动驾驶汽车的竞赛,增加了自动驾驶汽车从雷达传感器获得的信息量。华体会官网app下载新浪具体来说,在探测到目标后,主机车需要回答以下问题:
- 目标离我有多远?
- 目标接近或离开的速度有多快?
- 目标是在我的左边,右边还是正前方?
- 目标是在路上还是在地面上?
- 这个目标是什么?例如,是行人还是车辆?
汽车雷达技术通过提供以下“五维”数据集,帮助车辆及其车载感知算法回答这些问题:
- 范围
- 多普勒
- 到达方位(DoA)
- 到达仰角方向(DoA)
- 微
随着车辆从1级自动驾驶升级到5级自动驾驶,汽车雷达技术的应用范围将远远超出紧急刹车和自适应巡航控制,可靠性和精度要求也将不断提高。
虽然构建和测试非常有价值,但如果单独使用,它可能会非常昂贵和耗时,模拟雷达传感器硬件性能是设计雷达传感器的一种经济有效的方法。通过模拟,工程师可以在更短的产品开发周期内自信地设计、测试和验证传感器。
汽车雷达系统的仿真验证
虽然硬件仿真在传感器设计阶段很有价值,但在现实世界中验证和测试雷达传感器性能时,仿真变得更有价值。具体来说,雷达工程师需要确保雷达传感器能够准确地感知环境,并为车辆的感知算法提供一致的信息。如果做不到这一点,完全自动驾驶汽车的安全性就会严重受损。华体会官网app下载新浪
此外,工程师还需要在所谓的极端情况下测试雷达传感器的性能,这些情况对物理测试来说可能过于危险或昂贵。事实上,据估计,在完全自动驾驶汽车交付客户之前,还需要完成88亿英里的驾驶里程。华体会官网app下载新浪因此,模拟已经成为实现这一目标的唯一可行方法。通过模拟,工程师可以完成数十亿英里的虚拟驾驶,同时还可以在角落里安全地测试汽车雷达传感器的性能。

图1:使用Ansys HFSS SBR+求解器进行高保真电磁仿真的全尺寸交通场景
然而,并不是虚拟驱动器中的所有雷达传感器模拟都是相同的;由于模拟中引入的电磁保真度不同,它们在精度和速度上可能有很大差异。
具体而言,汽车雷达仿真的精度取决于虚拟环境的逼真程度以及包含了多少电磁波传播现象。为了加快雷达模拟速度,工程师有时会使用简单的原语来定义交通场景中的典型角色。这方面的一个例子是使用一个方框来定义一辆汽车,或者使用一组椭球来定义一个行人。另一种技术是使用系统级模拟,将目标定义为预定义的雷达横截面值,不需要主动电磁模拟。
这些方法都降低了在驾驶模拟过程中从这些虚拟雷达传感器获得的合成雷达回波的保真度。如果无法捕捉交通场景的真实电磁响应,可能会导致传感器过早验证,因为传感器在现实生活中表现不同且不可预测。此外,它可以抵消人工智能(AI)算法引入的收益,这些算法本可以用不正确的合成雷达数据构建。
Ansys HFFS SBR+解算器是一个渐近的,射线跟踪电磁解算器,有效地解决电大问题。HFSS SBR+采用几何光学(GO)、物理光学(PO)、均匀衍射理论(UTD)、物理衍射理论(PTD)和蠕变波(CW)来准确预测电磁波的传播。
我们将演示工程师如何使用HFSS SBR+从全尺寸交通场景中获得高精度的合成雷达返回。具体来说,我们将展示如何通过后处理HFSS SBR+合成雷达回波获得距离-多普勒图、距离-角度图和微多普勒剖面。
维度1和2:距离和多普勒
在基本层面上,雷达传感器通过发出电磁波并监听反射信号来确定目标的距离。反射信号的发射和接收之间的时间延迟可以用来计算目标的距离。
为了确定目标的速度,雷达通过测量反射信号频率的变化来利用多普勒效应。然而,要做到这一点,雷达传感器需要在相干处理间隔(CPI)内发射多个脉冲来确定频率变化。这对电磁模拟提出了挑战,因为一个CPI可以要求数百个模拟来获得一个单一的距离-多普勒帧。
HFSS SBR+利用其先进的多普勒处理(ADP)功能解决了这一挑战。利用ADP, HFSS SBR+在发射单个脉冲的同一时间内获得整个距离-多普勒帧的合成雷达回波。这导致某些雷达场景的加速超过100倍。
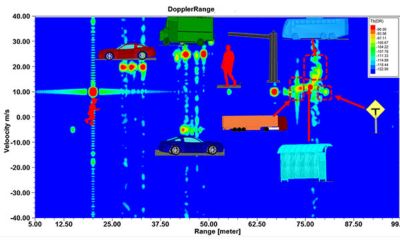
图2:使用HFSS SBR+的先进多普勒处理(ADP)特征获得的图1所示场景的距离多普勒图。
尺寸3和4:到达方位和仰角方向(DoA)
汽车雷达传感器可以通过使用物理分离的多个发射机(Tx)/接收机(Rx)天线来确定目标的到达方向。由于天线之间的间距已经已知,因此可以通过测量每个天线接收到的信号之间的渐进相移来确定到达方向。
除了高分辨率确定目标的距离和速度外,在复杂城市环境中导航的自动驾驶车辆还需要具有高方位角和仰角分辨率的雷达传感器。华体会官网app下载新浪
尺寸和成本限制了可用于实现高分辨率DoA估计的通道的物理数量。多输入/多输出(MIMO)方案比单输入/多输出(SIMO)系统使用更少的物理通道实现更大的虚拟阵列。增加通道数量会显著增加模拟开销,因为需要计算更多的Tx/Rx耦合。HFSS SBR+可以有效地处理任意数量MIMO信道的模拟。通过使用仿真,工程师甚至可以在构建传感器之前就确定满足各种驾驶场景的性能规格所需的通道数量。
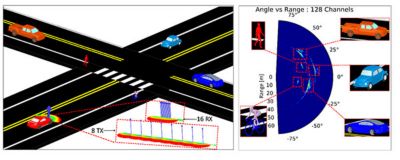
图3:使用128通道MIMO传感器获得的全尺寸交通场景及其方位距离-角度图。同样的原理也可以用于仰角DoA。
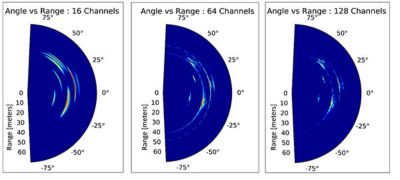
图4:评估信道数对DoA估计分辨率的影响。增加通道数量可以提高分辨率。
维度5:微多普勒
我们提到了安装雷达传感器的车辆与环境中的目标之间的相对运动如何改变反射信号的频率。这就是多普勒效应。速度组件通常是整个平台的大量运动。如果目标上有附加的具有旋转或振荡运动的组件,这些附加的组件可以引入所谓的微运动,可以进一步调制反射信号。这种对反射信号的进一步调制称为微多普勒。
例如,一个人的目标有大量的运动速度,可以归因于躯干。腿、脚和手臂会产生它们自己的振荡微运动,从而产生独特的微多普勒信号。具体来说,使用微多普勒,车辆可以确定目标是行人、骑自行车的人还是其他车辆。微多普勒甚至可以用来区分目标是动物还是人。HFSS SBR+的高保真物理方法使工程师能够准确地模拟目标的分布性质和微运动诱导的微多普勒效应。
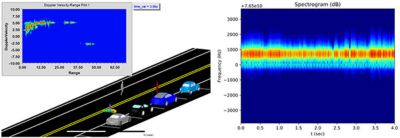
图5:交通场景(左)和没有摆动肢体的“滑行”行人的频谱图(右)。
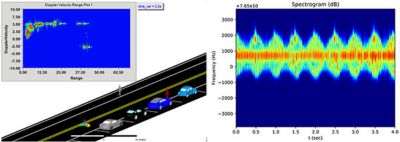
图6:交通场景(左)和自然行走的摆动胳膊和腿的行人光谱图(右)。由手臂和腿部引入的微多普勒调节了来自主体平台(躯干)的多普勒返回。
汽车雷达系统推进全自动驾驶汽车华体会官网app下载新浪
汽车雷达是开发全自动驾驶汽车必不可少的骨干传感器技术。华体会官网app下载新浪雷达传感器将不仅用于探测目标,还能准确确定目标的距离、移动的速度和角度,甚至目标是动物、行人还是骑自行车的人。
HFSS SBR+是一个基于物理的电磁求解器,使工程师能够准确模拟真实的交通状况,并开发用于安全自动驾驶车辆运行的雷达传感器。华体会官网app下载新浪通过注册我们的汽车雷达模拟网络研讨会了解更多信息。
看看Ansys可以为您做什么
看看Ansys可以为您做什么
联系我们
今天就联系我们
